SLAM-Based Forest Plot Mapping by Integrating IMU and Self-Calibrated Dual 3-D Laser Scanners
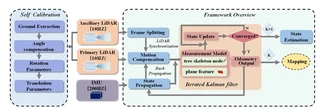 Designed BLS system and the framework overview
Designed BLS system and the framework overviewHighlights
- Disassembly-Free Dual-Scanner BLS System: Designed a backpack laser scanning system integrating IMU with dual laser scanners (horizontal + inclined), where scanners can be folded into the backpack for protection without requiring disassembly.
- High-Precision Automatic Self-Calibration: Proposed a robust self-calibration method based on angle compensation and fixed rotation angles, achieving rotation errors less than 1° and translation errors around 1 cm even with limited overlapping FOV.
- Forest-Specific SLAM Framework: Developed a tightly-coupled SLAM framework that fuses IMU measurements with forest natural features (tree skeleton nodes and plane features), utilizing an iterated error-state Kalman filter for accurate motion estimation.
- Centimeter-Level Accuracy: Achieved mean errors and RMSE less than 3.0 cm in both horizontal and vertical directions across three challenging forest plots (0.1 ha each) with varying crown densities (0.25–0.96).
- Superior Performance: Outperformed state-of-the-art SLAM methods (LIO-SAM, FAST-LIO2, R-LINS, MULLS) with 60% lower planimetric errors and more regular trunk cross-sections.
Methodology
The proposed system consists of three main components:
Hardware System Design:
- Dual Scanner Configuration: One horizontal scanner (L1) for below-canopy information and SLAM processing, one inclined scanner (L2) for vertical forest information acquisition
- IMU Integration: Rigidly connected IMU (200Hz) providing high-frequency motion estimation and point cloud de-skewing
- Wearable Platform: Telescopic rod-based backpack system allowing scanners to fold for protection
Dual-Scanner Self-Calibration:
- Ground Extraction: Automatic ground plane detection using RANSAC in both scanner coordinate systems
- Angle Compensation: Cost function minimization using roll and pitch angles to align ground planes
- Rotation Parameters: Euler angle computation with fixed yaw angles provided by manufacturer mounting base
- Translation Parameters: Geometric calculation based on known installation distances and rotation angle θ (typically ~80°)
SLAM Framework (Iterated Error-State Kalman Filter):
- State Propagation: IMU-based error state propagation with 200Hz frequency
- Motion Compensation: Backpropagation for point cloud deskewing using IMU measurements
- Measurement Model:
- Tree Skeleton Constraints: Trunk skeleton nodes to centerline distance for strong horizontal constraints
- Plane Constraints: Point-to-plane distance using ground and branch features for vertical constraints
- Iterative Update: Maximum a posteriori (MAP) estimation combining prior IMU prediction and feature measurements
Experimental Setup
Validation conducted in three forest plots in Zhuhai, Guangdong Province, China:
| Plot | Tree Species | Avg. Height | Avg. DBH | Stem Density | Crown Density | Terrain |
|---|---|---|---|---|---|---|
| 1 | Roystonea regia | 10 m | 18 cm | 445/ha | 0.25 | Flat |
| 2 | Ficus macrocarpa | 6 m | 16 cm | 1,010/ha | 0.96 | Dense planting |
| 3 | Eucalyptus | 26 m | 28 cm | 389/ha | 0.89 | Undulating |
- Sensors: Velodyne VLP-16 LiDAR ×2, LPMS-IG1 IMU, Leica BLK360 (reference TLS)
- Trajectory: “S”-shape scanning path at 0.6 m/s speed
- Reference: Multi-scan TLS with artificial reflectors for accuracy assessment
Experimental Results
Mapping Accuracy Comparison:
| Method | Plot 1 RMSE (m) | Plot 2 RMSE (m) | Plot 3 RMSE (m) |
|---|---|---|---|
| MULLS | 0.059 | - (Failed) | - (Failed) |
| R-LINS | 0.056 | 0.087 | - (Failed) |
| FAST-LIO2 | 0.036 | 0.034 | 0.070 |
| LIO-SAM | 0.030 | 0.033 | 0.072 |
| Ours | 0.024 | 0.022 | 0.044 |
Planimetric (Horizontal) Accuracy:
| Plot | Mean (m) | RMSE (m) | SD (m) | MAX (m) |
|---|---|---|---|---|
| 1 | 0.019 | 0.024 | 0.013 | 0.033 |
| 2 | 0.020 | 0.022 | 0.014 | 0.038 |
| 3 | 0.039 | 0.044 | 0.020 | 0.049 |
Vertical (Z) Accuracy:
| Plot | Mean (m) | RMSE (m) | SD (m) | MAX (m) |
|---|---|---|---|---|
| 1 | 0.009 | 0.008 | 0.011 | 0.018 |
| 2 | 0.010 | 0.010 | 0.009 | 0.021 |
| 3 | 0.013 | 0.014 | 0.008 | 0.027 |
Forest Parameter Extraction Accuracy:
- DBH (Diameter at Breast Height, 1.3m): Mean error ~0.015–0.022 m across three plots
- Stem Curve: Mean error ~0.015–0.020 m for diameter measurements at various heights
Key Findings
Calibration Robustness: The proposed self-calibration method maintains consistency (rotation angle difference < 1°, translation < 1 cm) across diverse scenarios (room, road, grass, forest) without requiring additional calibration devices or overlapping FOV.
Feature Superiority: Tree skeleton nodes provide invariant geometric constraints compared to traditional edge/plane features, eliminating matching errors caused by cylindrical trunk symmetry and scanner motion.
IMU-Fusion Benefits: Tightly-coupled IMU integration prevents SLAM degradation in feature-sparse forest regions and enables effective point cloud deskewing, critical for mobile scanning in dense forests.
Scalability: Processing speed of ~0.03s per frame on standard laptop (Intel i5-12500H, 16GB RAM), enabling real-time forest mapping capabilities.
Limitations: Dense canopy environments (>0.9 crown density) still pose challenges for complete above-canopy data acquisition; future work suggests integrating UAV laser scanning (ULS) for full crown coverage.

I am currently a Ph.D. candidate at the Ai4City-Lab, Urban Governance and Design Thrust, Society Hub, The Hong Kong University of Science and Technology (Guangzhou), under the supervision of Prof. Wufan Zhao and Prof. Yuan Liu. Prior to this, I obtained my Master’s degree from the School of Geospatial Engineering and Science, Sun Yat-sen University, where I was advised by Prof. Wuming Zhang and Prof. Yiping Chen.
My research focuses on 3D visual perception, intelligent interpretation and processing of point cloud data, and multi-modal urban foundation models. I am particularly interested in bridging geometric understanding with semantic reasoning in large-scale urban environments, with an emphasis on open-vocabulary learning, training-free paradigms, and cross-modal fusion between 2D and 3D data.
My goal is to develop scalable, interpretable, and generalizable AI systems for urban analysis, enabling applications such as digital twin construction, urban scene understanding, and intelligent infrastructure management.