SLAM-Based Forest Plot Mapping by Integrating IMU and Self-Calibrated Dual 3-D Laser Scanners
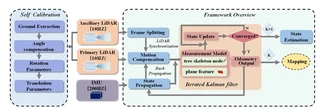 Designed BLS system and the framework overview
Designed BLS system and the framework overviewHighlights
- Disassembly-Free Dual-Scanner BLS System: Designed a backpack laser scanning system integrating IMU with dual laser scanners (horizontal + inclined), where scanners can be folded into the backpack for protection without requiring disassembly.
- High-Precision Automatic Self-Calibration: Proposed a robust self-calibration method based on angle compensation and fixed rotation angles, achieving rotation errors less than 1° and translation errors around 1 cm even with limited overlapping FOV.
- Forest-Specific SLAM Framework: Developed a tightly-coupled SLAM framework that fuses IMU measurements with forest natural features (tree skeleton nodes and plane features), utilizing an iterated error-state Kalman filter for accurate motion estimation.
- Centimeter-Level Accuracy: Achieved mean errors and RMSE less than 3.0 cm in both horizontal and vertical directions across three challenging forest plots (0.1 ha each) with varying crown densities (0.25–0.96).
- Superior Performance: Outperformed state-of-the-art SLAM methods (LIO-SAM, FAST-LIO2, R-LINS, MULLS) with 60% lower planimetric errors and more regular trunk cross-sections.
Methodology
The proposed system consists of three main components:
Hardware System Design:
- Dual Scanner Configuration: One horizontal scanner (L1) for below-canopy information and SLAM processing, one inclined scanner (L2) for vertical forest information acquisition
- IMU Integration: Rigidly connected IMU (200Hz) providing high-frequency motion estimation and point cloud de-skewing
- Wearable Platform: Telescopic rod-based backpack system allowing scanners to fold for protection
Dual-Scanner Self-Calibration:
- Ground Extraction: Automatic ground plane detection using RANSAC in both scanner coordinate systems
- Angle Compensation: Cost function minimization using roll and pitch angles to align ground planes
- Rotation Parameters: Euler angle computation with fixed yaw angles provided by manufacturer mounting base
- Translation Parameters: Geometric calculation based on known installation distances and rotation angle θ (typically ~80°)
SLAM Framework (Iterated Error-State Kalman Filter):
- State Propagation: IMU-based error state propagation with 200Hz frequency
- Motion Compensation: Backpropagation for point cloud deskewing using IMU measurements
- Measurement Model:
- Tree Skeleton Constraints: Trunk skeleton nodes to centerline distance for strong horizontal constraints
- Plane Constraints: Point-to-plane distance using ground and branch features for vertical constraints
- Iterative Update: Maximum a posteriori (MAP) estimation combining prior IMU prediction and feature measurements
Experimental Setup
Validation conducted in three forest plots in Zhuhai, Guangdong Province, China:
| Plot | Tree Species | Avg. Height | Avg. DBH | Stem Density | Crown Density | Terrain |
|---|---|---|---|---|---|---|
| 1 | Roystonea regia | 10 m | 18 cm | 445/ha | 0.25 | Flat |
| 2 | Ficus macrocarpa | 6 m | 16 cm | 1,010/ha | 0.96 | Dense planting |
| 3 | Eucalyptus | 26 m | 28 cm | 389/ha | 0.89 | Undulating |
- Sensors: Velodyne VLP-16 LiDAR ×2, LPMS-IG1 IMU, Leica BLK360 (reference TLS)
- Trajectory: “S”-shape scanning path at 0.6 m/s speed
- Reference: Multi-scan TLS with artificial reflectors for accuracy assessment
Experimental Results
Mapping Accuracy Comparison:
| Method | Plot 1 RMSE (m) | Plot 2 RMSE (m) | Plot 3 RMSE (m) |
|---|---|---|---|
| MULLS | 0.059 | - (Failed) | - (Failed) |
| R-LINS | 0.056 | 0.087 | - (Failed) |
| FAST-LIO2 | 0.036 | 0.034 | 0.070 |
| LIO-SAM | 0.030 | 0.033 | 0.072 |
| Ours | 0.024 | 0.022 | 0.044 |
Planimetric (Horizontal) Accuracy:
| Plot | Mean (m) | RMSE (m) | SD (m) | MAX (m) |
|---|---|---|---|---|
| 1 | 0.019 | 0.024 | 0.013 | 0.033 |
| 2 | 0.020 | 0.022 | 0.014 | 0.038 |
| 3 | 0.039 | 0.044 | 0.020 | 0.049 |
Vertical (Z) Accuracy:
| Plot | Mean (m) | RMSE (m) | SD (m) | MAX (m) |
|---|---|---|---|---|
| 1 | 0.009 | 0.008 | 0.011 | 0.018 |
| 2 | 0.010 | 0.010 | 0.009 | 0.021 |
| 3 | 0.013 | 0.014 | 0.008 | 0.027 |
Forest Parameter Extraction Accuracy:
- DBH (Diameter at Breast Height, 1.3m): Mean error ~0.015–0.022 m across three plots
- Stem Curve: Mean error ~0.015–0.020 m for diameter measurements at various heights
Key Findings
Calibration Robustness: The proposed self-calibration method maintains consistency (rotation angle difference < 1°, translation < 1 cm) across diverse scenarios (room, road, grass, forest) without requiring additional calibration devices or overlapping FOV.
Feature Superiority: Tree skeleton nodes provide invariant geometric constraints compared to traditional edge/plane features, eliminating matching errors caused by cylindrical trunk symmetry and scanner motion.
IMU-Fusion Benefits: Tightly-coupled IMU integration prevents SLAM degradation in feature-sparse forest regions and enables effective point cloud deskewing, critical for mobile scanning in dense forests.
Scalability: Processing speed of ~0.03s per frame on standard laptop (Intel i5-12500H, 16GB RAM), enabling real-time forest mapping capabilities.
Limitations: Dense canopy environments (>0.9 crown density) still pose challenges for complete above-canopy data acquisition; future work suggests integrating UAV laser scanning (ULS) for full crown coverage.